|
Miheer Diwan Robotics Engineer I'm working at the intersection of Computer Vision and AI to bridge the sim-to-real gap! I recently completed my Master's degree in Robotics Engineering from Worcester Polytechnic Institute (WPI), Worcester, USA where I worked at the PeAR Lab on Vision and Navigation projects. I also hold a Bachelor's degree in Mechatronics Engineering from NMIMS University, Mumbai, India. Email / Resume / LinkedIn / Github / CAD I am actively looking for Internships/ Full-Time opportunities! |
|
Education |
|
Worcester Polytechnic Institute
Masters in Robotics Engineering — 2022 - 2024 Relevant Coursework:
Affiliations:
GPA : 3.87 |
|
|
Mukesh Patel School Of Technology Management & Engineering, NMIMS University, Mumbai
Bachelor's in Mechatronics Engineering ( Minor: Robotics & IoT ) — 2018 - 2022 Relevant Coursework:
Affiliations:
GPA : 3.46 |
SkillsRobotics: Perception, Localization, Deep Learning, ADAS, Aerial Robotics, State Estimation, Sensor Fusion, Calibration Software: Python, C++, ROS/ Gazebo, OpenCV, PyTorch, TensorFlow, CUDA, TensorRT, NumPy, SciPy, PCL, Open3D, scikit-learn, Matplotlib, MATLAB/ Simulink, Docker, Linux, Git, LaTeX, SolidWorks, Blender, CoppeliaSim, NI LabVIEW Hardware: DJI Tello EDU, Jetson Orin Nano, Arduino, Raspberry Pi, Yaskawa Motoman MH5, 3D Printing, Rapid Prototyping, Oak-D Pro, Realsense D435, Velodyne VLP-16 Lidar Network Architectures: YOLO, CNN, DERT, R-CNN, Fast R-CNN, VGG16, ResNet18, DenseNet, U-Net, LSTM, TCN, HomographNet , NeRF Languages: English (native fluency), Hindi (native fluency), Marathi (native fluency) |
Experience |
|
Robotics Software Engineering Intern — Sept 2024 - Present
|

|
Computer Vision Graduate Researcher — Aug 2023 - Dec 2023 Advisor: Prof. Nitin J Sanket Sim-2-Real Autonomous Quadrotor Navigation in the Wild
|
|
Autonomous Vehicles Graduate Researcher — May 2023 - Aug 2023
Advisor: Prof. Xinming Huang Voxel-based Autonomous Driving and Point Cloud Segmentation
|
|
|
Control Systems Intern — June 2021 - Nov 2021 Back-EMF-based Sensorless Control of BLDC Motor Using MATLAB/Simulink - Conducted comprehensive research, exploring and analyzing multiple non-linear methods for BLDC motor speed control.
|
|
|
Co-Head Design & Simulation Department — June 2019 - Dec 2021 - Headed a team of 15 people to develop four mobile robots: Arrow-Shooting robot and Ball-Throwing robot.
|
Computer Vision & Deep Learning |

|
Pb-Lite
Project Page Per-Pixel Probabilistic Boundary Detection Algorithm |

|
Panorama Stitching
Project Page Stitched images having overlapping features to create a panorama using feature matching, ANMS, homography estimation, RANSAC. |
|
Einstein Vision: Perception Stack for Autonomous Vehicles
Project Page This project leverages classical computer vision and Deep learning techniques to develop a perception stack for autonomous vehicles. Additionally, a Tesla-inspired visualization was also developed using Blender to recreate a 3D scene from monocular images autnomously. |
|
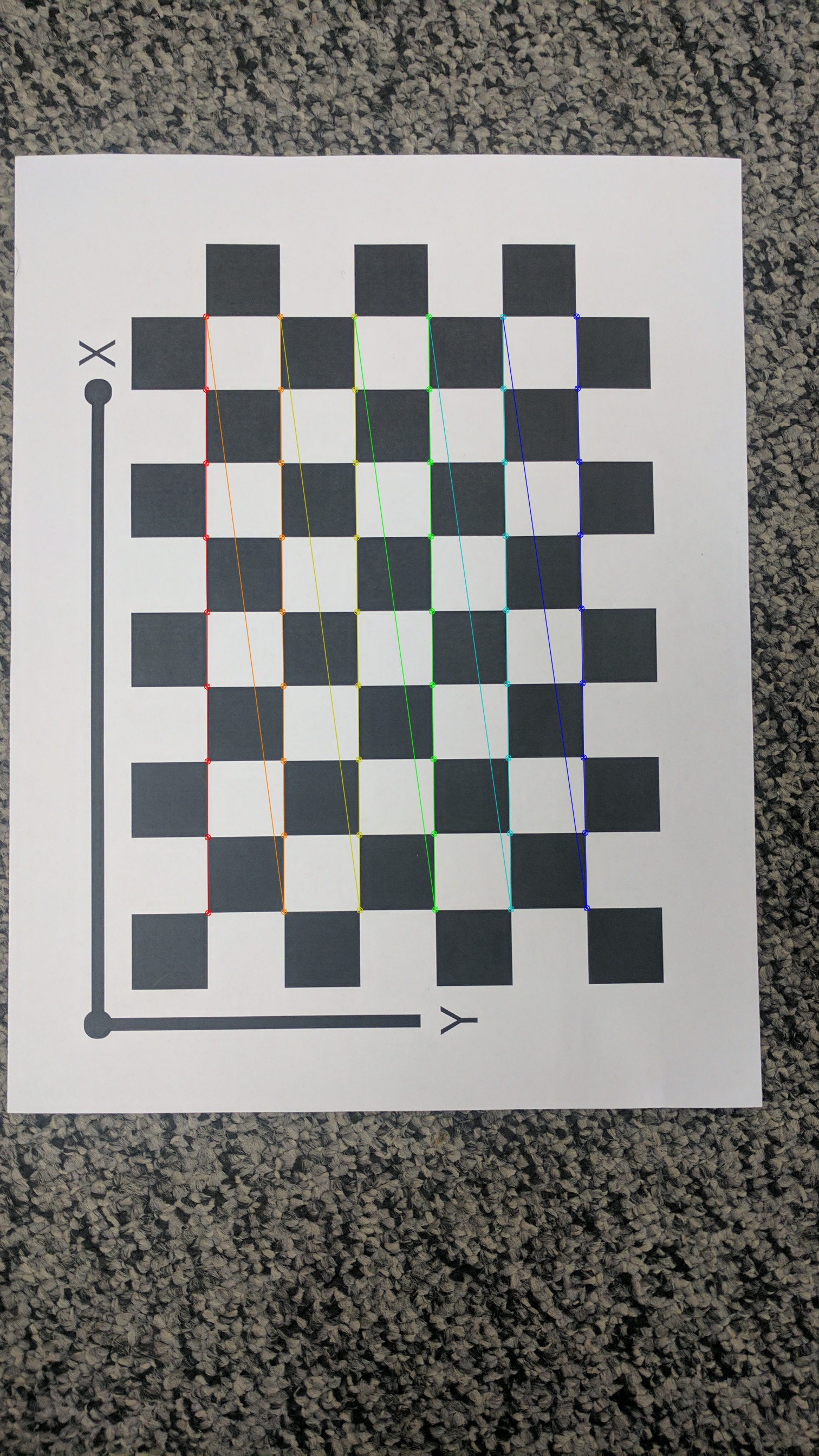
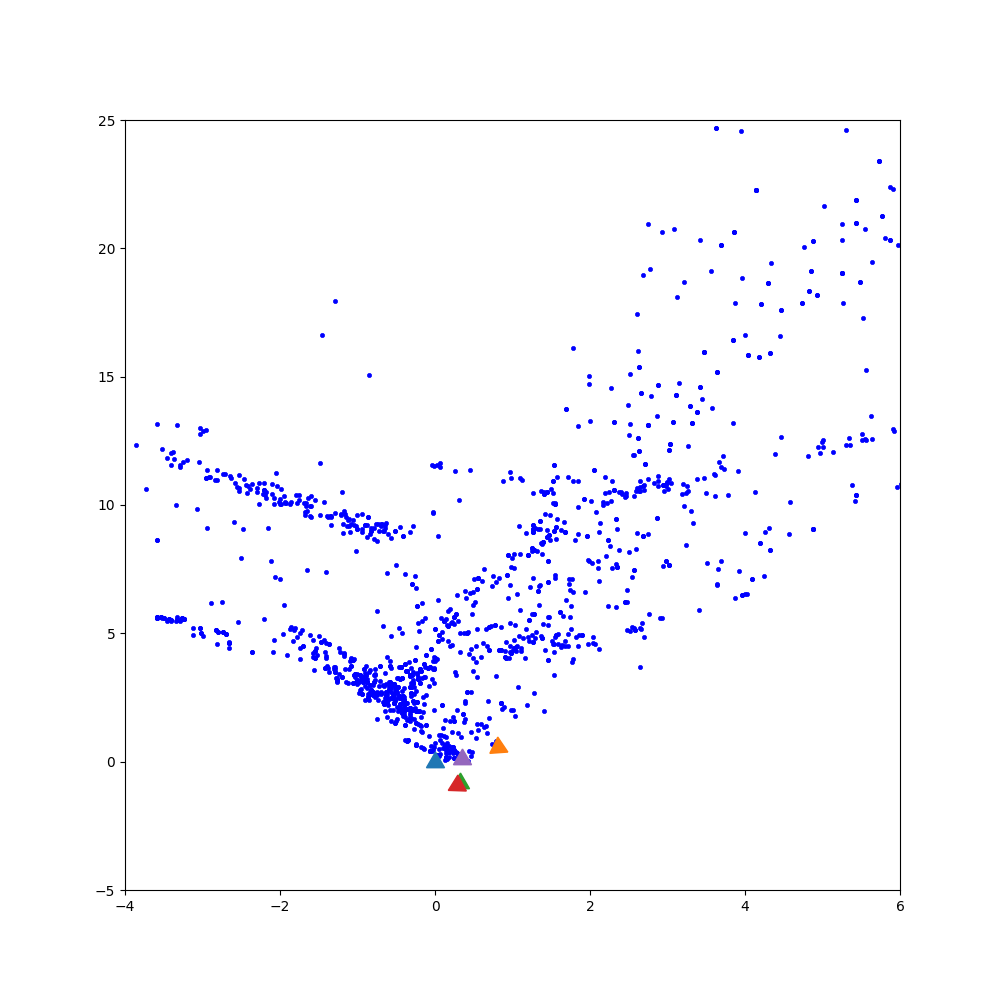
Camera Calibration
Project Page Implemented an algorithm to automate the estimation of camera intrinsics using a mathematical model proposed by Zhengyou Zhang. |
|
|
Gaussian Splatting
Evaluated performance of state-of-the-art Gaussian Splatting method for real-time radiance field rendering on custom dataset featuring WPI's mascot 'Gompei'. |
|
Neural Radiance Fields (NeRF)
Project Page Implemented NeRF pipeline following this NeRF paper. |
|
Structure from Motion (SfM)
Project Page This project implements a Structure from Motion pipeline for obtaining camera poses from monocular images of a given scene and reconstructing the 3D scene by leveraging Epipolar geometry. |
|
Visual Inertial Odometry (VIO)
Implemented advanced Multi-State Constraint Kalman Filter (MSCKF) following a paper for robust sensor fusion. |
Machine Learning |
|
Decision Trees | Project Page
Linear Regression | Project Page Logistic Regression with SGD | Project Page Softmax Regression | Project Page Classification using Neural Networks | Project Page SVM | Project Page |
Aerial Robotics |
|
|
The Perception Saga: Sim-2-Real Quadrotor Perception Stack
Project Page - Engineered a perception stack using synthetic data and YOLOv8 for detecting and segmenting windows.
|
|
|
Quadrotor Motion Planning Stack
Project Page - Implemented RRT path planner and cubic spline trajectory generator for quadrotor in 3D using Blender.
|
|
|
Robust Quadrotor Trajectory Tracking Using Sliding Mode Control
Project Page Design of a sliding mode controller for altitude and attitude control of the Crazyflie 2.0 to enable the quadrotor to track desired trajectories and visit a set of desired waypoints. |
|
Waypoint Navigation and AprilTag Landing
Project Page Developed a dynamic 3D waypoint navigation algorithm and integrated AprilTag scanning for landing maneuvers. Engineered a Cascaded PID controller based on the PX4 stack to ensure precise trajectory tracking. |
Localization and Navigation |
|
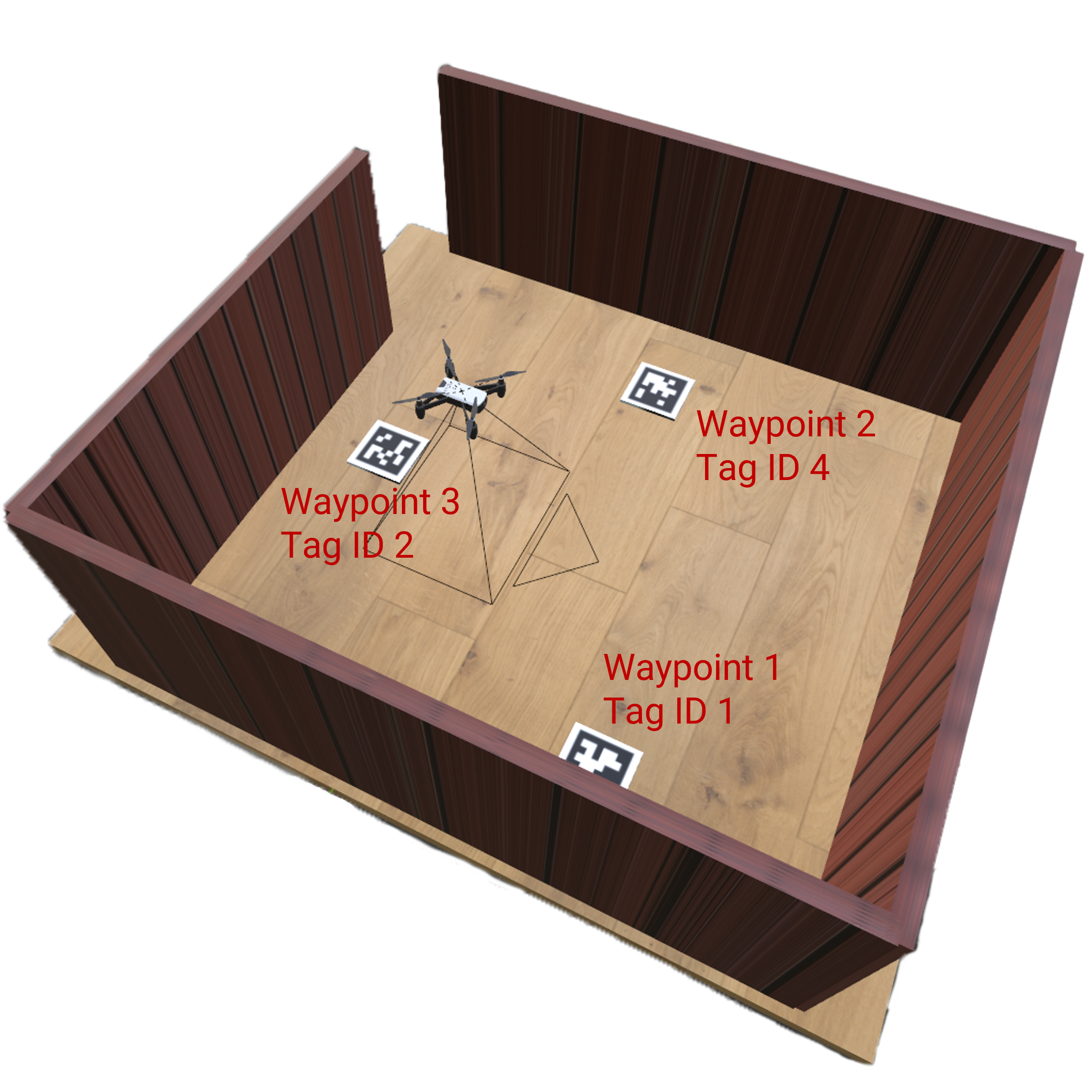
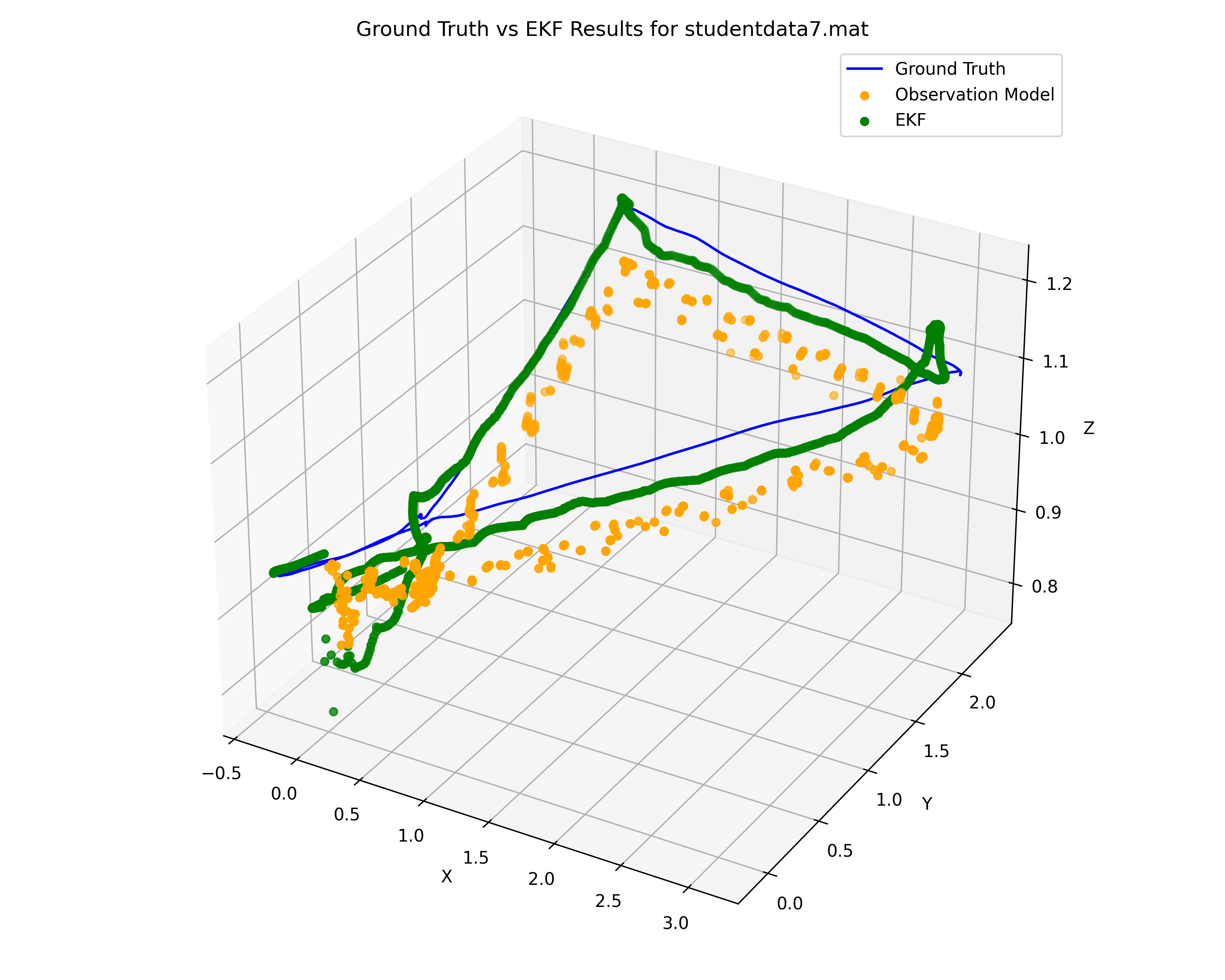
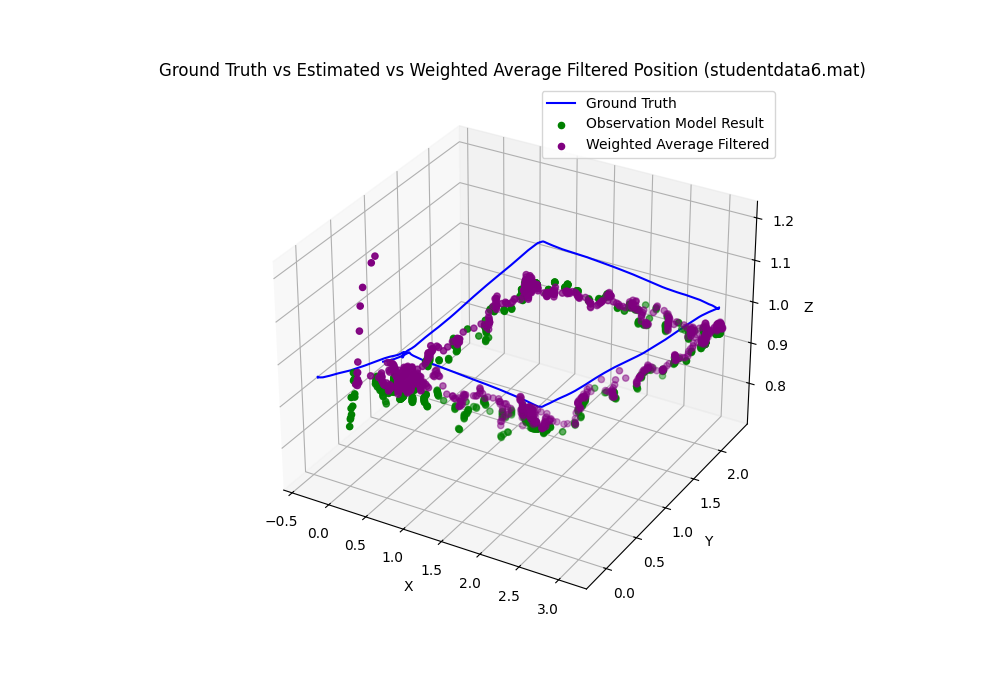
Vision-Based Localisation using Non-linear Kalman Filters
Project Page Performed robust quadrotor pose estimation in 3D space by using Quadrotor Dynamics and Extended Kalman Filter Developed a vision-based observation model to get pose-estimates from AprilTags and improve prediction accuracy. |
|
|
Bayes Filter
Project Page Implemented a Bayes filter for state estimation of a robot in a 2D space. |
|
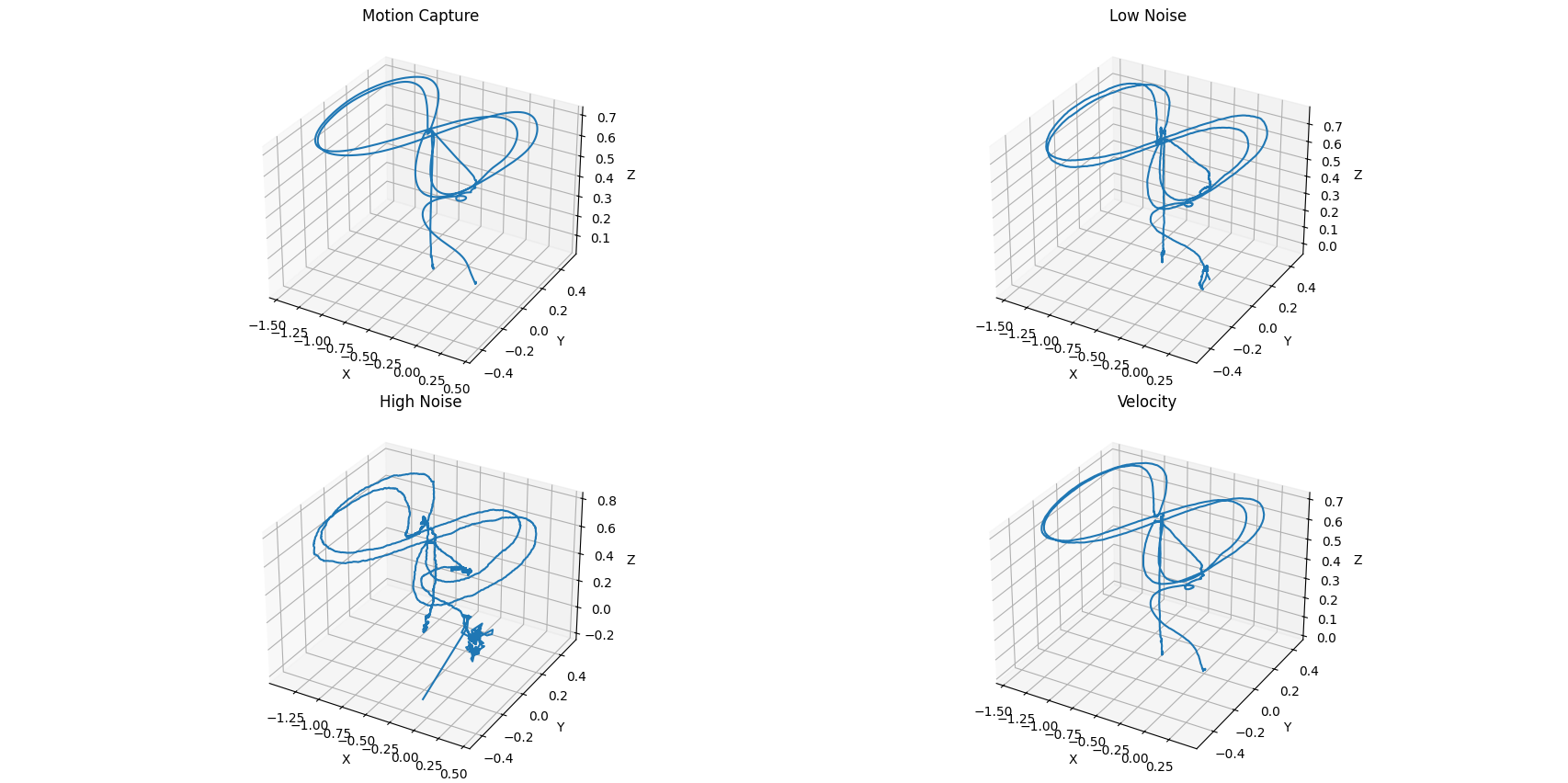
Kalman Filter
Project Page Implemented a Kalman Filter in Python for quadrotor localization in 3D space. |
|
Particle Filter
Project Page Implemented a Particle Filter (EKF) in Python for quadrotor localization in 3D space. |
Robotics Projects |
|
|
SCARA Robot Simulator
Project Page Position and Velocity control of SCARA robot using a PID Controller in a simulated environment in ROS2 and Gazebo. |